| ||||||||||||||||||
SafeG-Autoとは
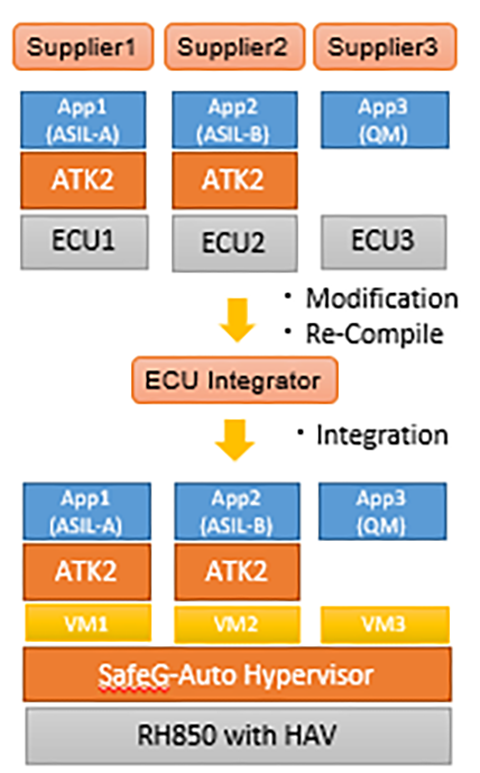
SafeG-Autoは車載制御システムの統合(ECU統合)のためのハイパーバイザーです。
Safe-Autoは、 RH850/U2A等が搭載するhardware assisted virtualization(HAV)を用いた仮想マシンを提供します。HAVを用いることにより、低い実行オーバヘッドで仮想マシンを実現しています。SafeG等とは異なり複数の仮想マシンを実現する事ができます。各仮想マシンは、空間・時間的にパーティショニングされた環境で実行されます。 空間パーティショニングはHAVが提供するハイパーバイザー制御のMPUにより、時間パーティショニングはTDMAスケジューリングにより実現しています。
SafeG-Autoを利用する利点
SafeG-Autoを用いることにより各仮想マシン内のソフトウェアは統合前のコードから大きな変更なしに動作させる事ができます。
SafeG-Autoの配布パッケージには、仮想マシン内で動作するTOPPERS/ATK2カーネルが含まれています。 そのため、TOPPERS/ATK2カーネル上で実現したソフトウェアは容易にSafeG-Auto上で動作させることができます。
SafeG-Autoの機能
SafeG-Autoの仕様書はここから、 SafeG-Autoのコンフィギュレータの仕様書は ここからアクセス可能です。
- 複数の仮想マシンを空間・時間的にパーティショニングした環境で実行
- 空間パーティショニングはハイパーバイザーに制御されたMPUにより許可されたメモリ領域以外へのアクセスを禁止することで実現。
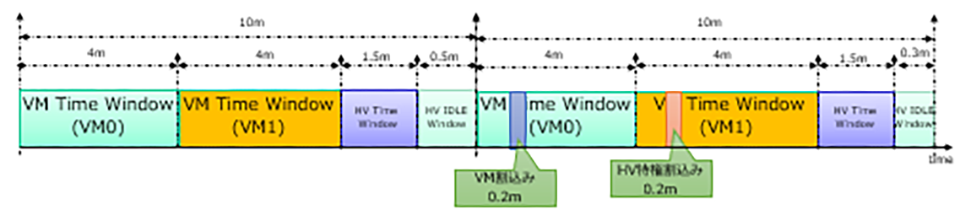
- 時間パーティショニングはハイパーバイザーによるTDMAスケジューリングにより割り当てられたタイムウィンドウのみで実行することで実現。
- 2種類の割込みのサポートによるリアルタイム性とパーティショニングの両立
- 各仮想マシンに割り当てるVM割込み。割り当てた仮想マシンのタイムウィンドウが実行されているタイミングのみで受け付けられる。
- ハイパーバイザーが使用するHV特権割込み。発生すると実行されているタイムウィンドウを一時的に停止してハイパーバイザーの割込みハンドラを呼び出す割込み。
- マルチコアサポート
- 各コアでシステム周期は共通として、コアごとにタイムウィンドウを設定可能。
- VM間通信機能
- 状態変数 : 1:n向けのキューイングなしの通信を実現。
- メッセージキュー : 1:1のキューイング通信を実現。メッセージは最大長が設定されていて、それ以下の任意のサイズで送信可能。
対応ハードウェア
最新のリリースでは次のボードに対応しています。
- ルネサス エレクトロニクス株式会社 Y-RH850-U2A-516PIN-PB-T1-V1(RH850/U2A16)
- 株式会社サニー技研 GPXU2A (RH850/U2A8)
- ルネサス エレクトロニクス株式会社 R-Car S4 Reference Board/Spider(R-Car-S4)
ダウンロード
SafeG-Autoの開発はTOPPERSメンバーによって、TOPPERSのGitHubレポジトリで行われています。 ユーザ向けのパッケージはここからダウンロードできます。
| 最新のリリース | |||
| パッケージ | リリース | リリース日 | |
|---|---|---|---|
|
safeg-auto-1.1.0.zip (Zip形式) safeg-auto-1.1.0.tar.gz (tar.gz形式) |
1.1.0 | 2023-03-21 | |
|
safeg-auto-1.0.0.zip (Zip形式) safeg-auto-1.0.0.tar.gz (tar.gz形式) |
1.0.0 | 2022-08-01 | |
開発スタッフ
SafeG-Autoの開発に参加している開発スタッフは次の通りです(所属は参加した時点のもの)。
| 名前 | 所属 | 時期 |
|---|---|---|
| 本田晋也 | 南山大学 理工学部 | 2022年〜 |
| 山脇公 | サニー技研 車載第2技術部 | 2022年〜 |
※ 開発スタッフの名前は、掲載を了承された方のみ記載しています。